Overview plot
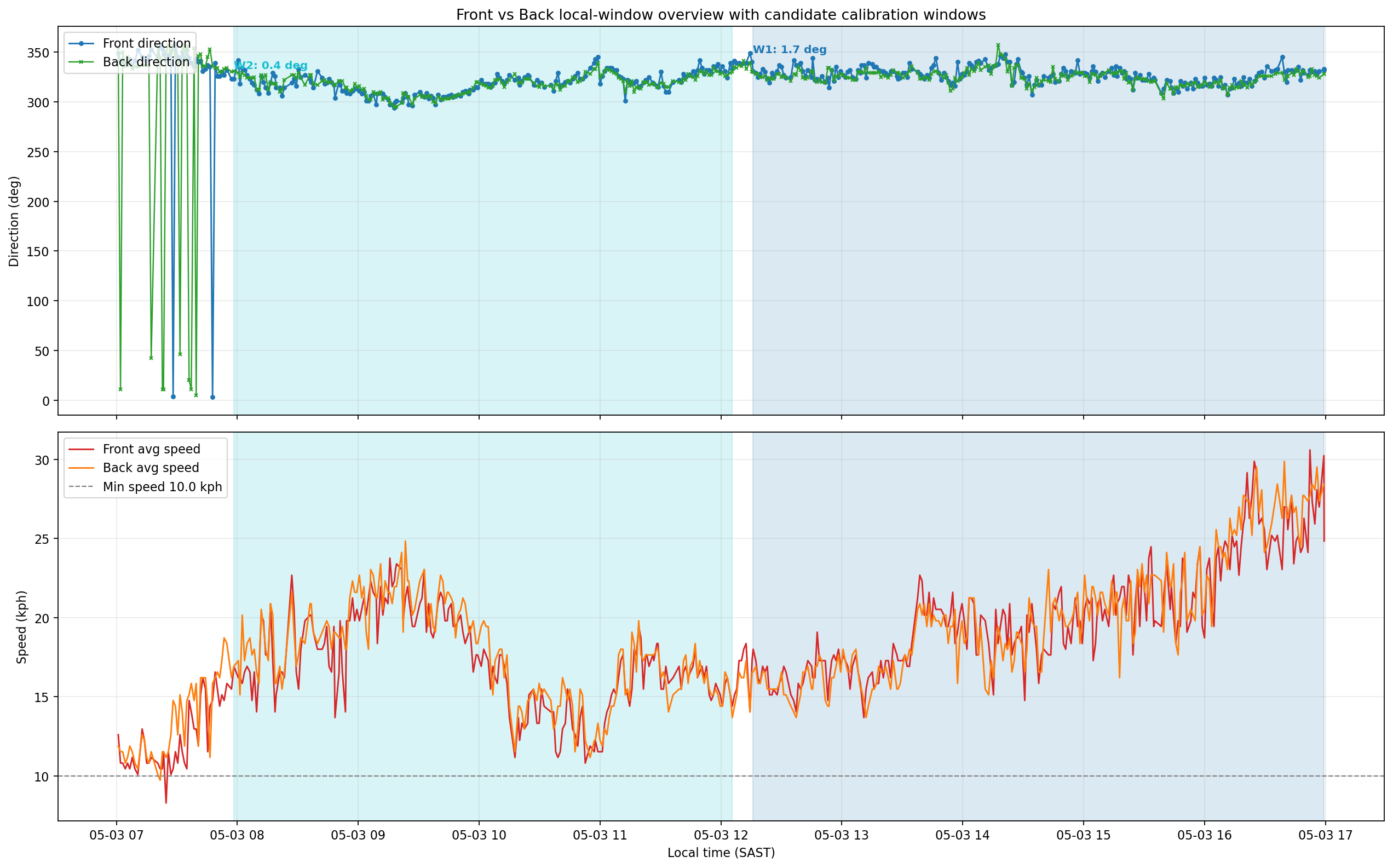
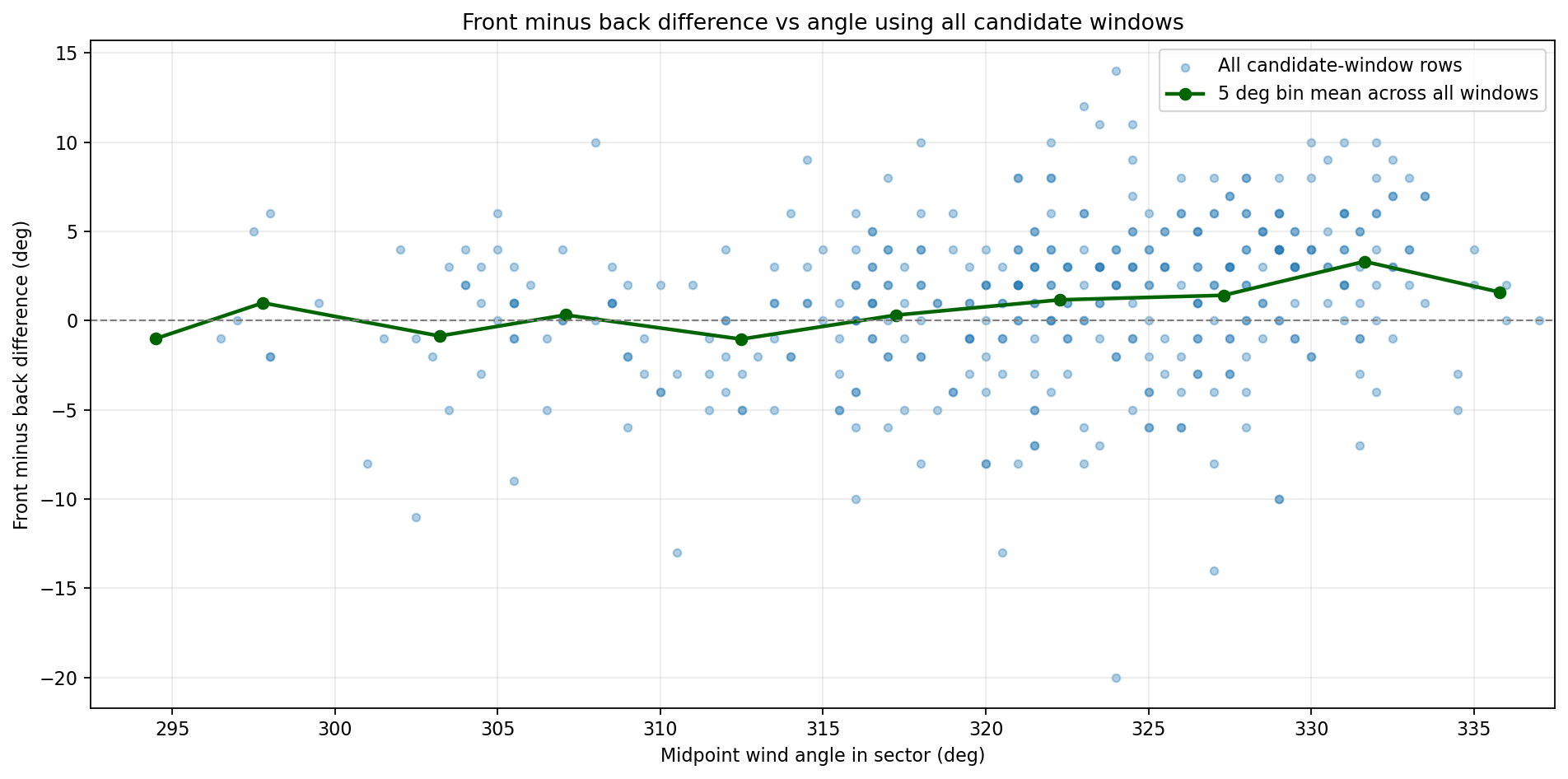
This report compares the PGsonda front sensor (lionsheadlower) against the back sensor (signalhill) over the selected local time window from 2026-05-03 07:00:00+02:00 to 2026-05-03 17:00:00+02:00. Only periods that satisfy the chosen direction sector, speed threshold, and stability filters are accepted as candidate calibration windows.
Identify stable, unobstructed wind periods where the front and back sensors can be compared directly, then quantify the average direction offset needed for front-sensor calibration while treating the back sensor as the reference.
lionsheadlowersignalhill-18.00 deg22.00 deg2026-05-03 07:00:00+02:00 to 2026-05-03 17:00:00+02:00| parameter | value | meaning |
|---|---|---|
| output_dir | E:\Project_PGSONDA_CALIB\reports\front_back_calibration | Folder where CSV files, plots, and report files are saved. |
| front_station | lionsheadlower | PGsonda logging name for the front sensor. |
| back_station | signalhill | PGsonda logging name for the back sensor. |
| front_correction | -18.0 | Direction correction applied as corrected = raw - correction for the front sensor. |
| back_correction | 22.0 | Direction correction applied as corrected = raw - correction for the back sensor. |
| direction_ranges | 292.5 to 337.5 deg | Allowed wind-direction sectors. Both sensors must lie inside these sectors to qualify. |
| min_speed_kph | 10.0 | Minimum wind speed that both sensors must exceed before a row can be used. |
| speed_column | avg_speed_kph | Which speed metric is filtered, usually avg_speed_kph or max_speed_kph. |
| stability_window | 20min | Rolling time window used to test directional stability. |
| max_direction_std_deg | 12.0 | Maximum circular standard deviation allowed inside the stability window. |
| min_window_minutes | 15.0 | Shortest accepted calibration window after filtering. |
| min_samples_in_window | 4 | Minimum number of paired rows required inside a valid window. |
| pair_tolerance_minutes | 5 | Maximum timestamp mismatch allowed when pairing front and back rows. |
| max_gap_minutes | 10 | Largest gap allowed between candidate rows before splitting into a new window. |
| window_id | start_local | end_local | duration_minutes | samples | front_mean_direction_deg | back_mean_direction_deg | front_minus_back_deg_from_means | front_minus_back_deg_mean_rows | front_direction_std_deg | back_direction_std_deg | front_avg_speed_kph | back_avg_speed_kph | front_max_speed_kph | back_max_speed_kph | avg_pair_gap_seconds |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2026-05-03 12:15:58.500000+02:00 | 2026-05-03 16:59:20.500000+02:00 | 283.4 | 209 | 325.76 | 324.03 | 1.73 | 1.73 | 6.51 | 6.06 | 20.37 | 20.46 | 23.18 | 22.65 | 20.3 |
| 0 | 2026-05-03 07:58:17+02:00 | 2026-05-03 12:05:37+02:00 | 247.3 | 192 | 317.31 | 316.93 | 0.37 | 0.38 | 9.89 | 8.90 | 17.28 | 17.89 | 19.74 | 19.87 | 19.0 |
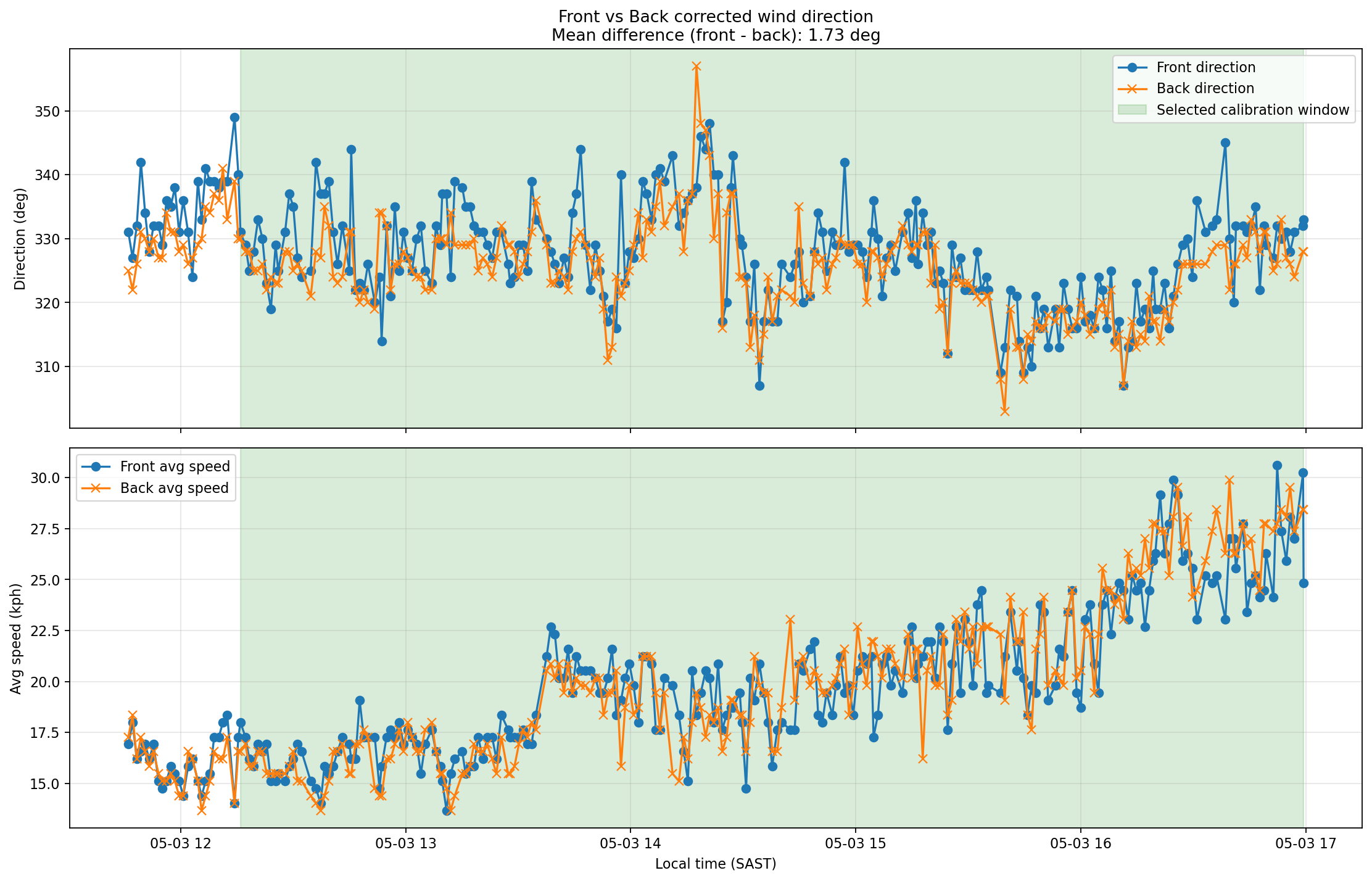
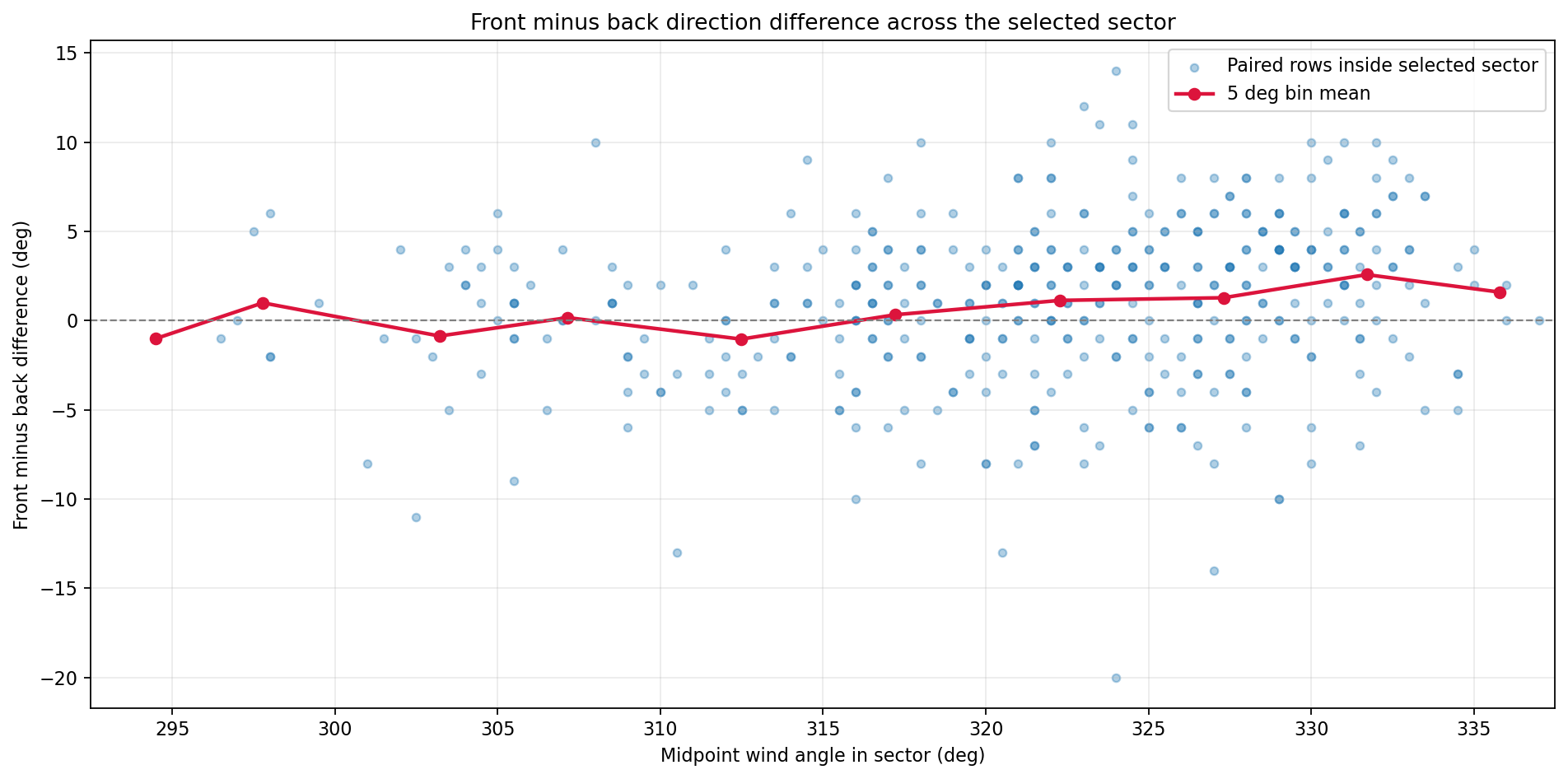
Best accepted window: 2026-05-03 12:15:58.500000+02:00 to 2026-05-03 16:59:20.500000+02:00 with a front-minus-back difference of 1.73 deg. Recommended front correction with back fixed: -16.90 deg.